“The kind of intelligence we are developing is very different from the intelligence we have” – Geoffrey Hinton


About
News
CVG Lab (formerly CV Lab) is Dr. Murtaza Taj’s research group. Our current research mainly focuses on different aspects of 2D Pose estimation, 3D reconstruction algorithms and remote sensing. The lab was established by Dr. Sohaib Khan in 2003 as the first graduate research lab in the Department of Computer Science, Lahore University of Management Sciences (LUMS), and one of the first computer vision labs in Pakistan.
تجربہ گاہِ مشینی بصارت
مشینی بصارت سے مراد کمپیوٹر میں تصاویر سے معلومات اخذ کرنے کی استعداد پیدا کرنا ہے۔ لمز کے سکول برائے سائنس و انجینئرنگ کے شعبہ کمپیوٹر سے وابستہ تجربہ گاہِ مشینی بصارت، پاکستان کی صفِ اوّل کی تحقیقی تجربہ گاہ ہے، جہاں محقیقین یکسوئی کے ساتھ تحقیق و تدریس کے عمل میں کوشاں ہیں۔ اس تجربہ گاہ میں لکھے گئے تحقیقی مقالوں کو عالمی سطح پر پزیرائی ملی ہے۔ دوسری جانب، یہاں پر پاکستان کے سماجی مسائل کے حوللے سے تکنیکی کاوشیں بھی جاری ہیں جن میں پاکستان کی دیہی نقشہ بندی کا منصوبہ قابلِ ذکر ہے۔
Projects
- Early Warning System for Forest Fire Detection

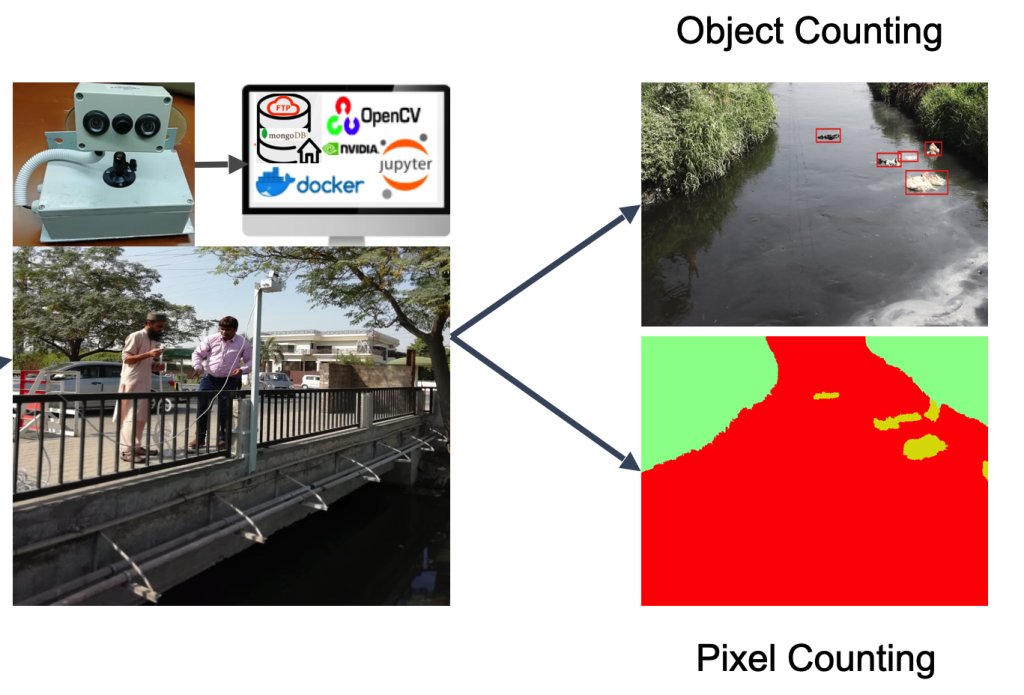
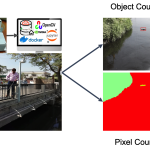
- Water Quality Assessment Using Visual Sensors
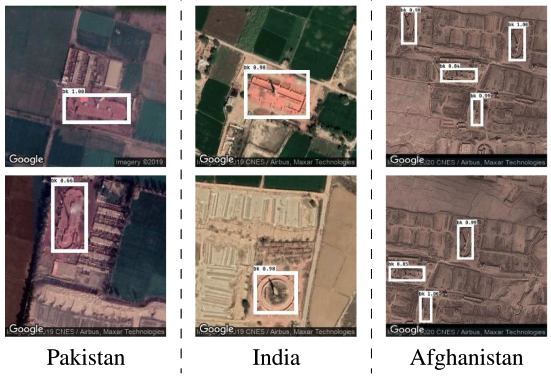
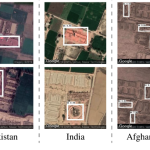
- IEEEJSTAR2020 – Kiln-Net: A gated neural network for detection of brick kilns in South Asia
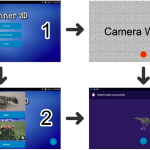
- Enabling 3D vision on hand-held devices
- NRSfM using Local Rigidity
- 3D Metric Rectification using Angle Regularity
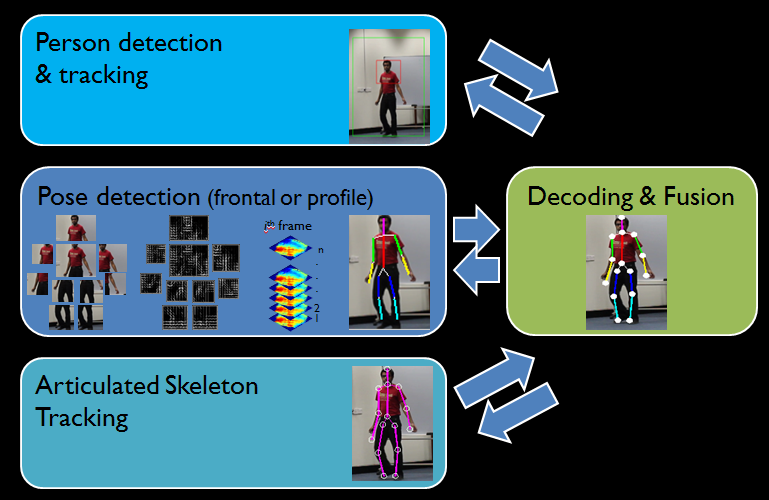
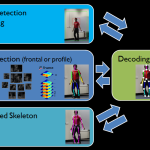
- 2D Pose Detection and Tracking
- Shape from Angle Regularity
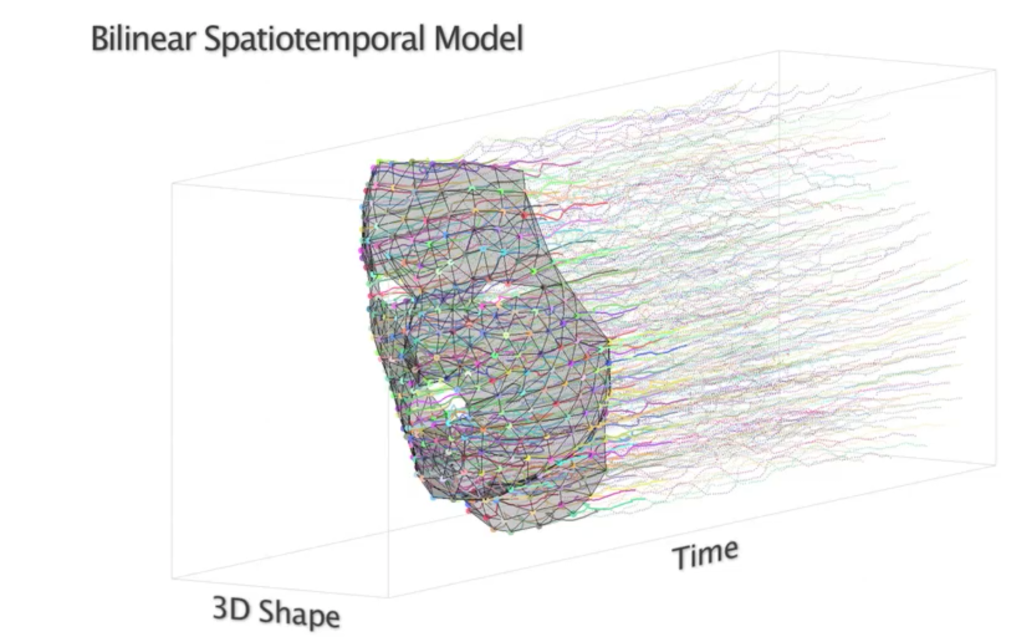
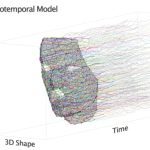
- Bilinear Spatiotemporal Basis Models – Project Page
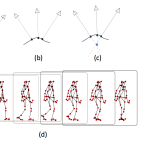
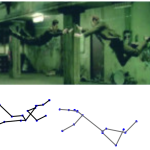
- Trajectory Basis for Nonrigid Structure from Motion – Project Page
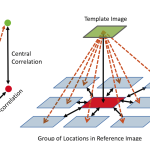
- Correlation Coefficient Based Fast Template Matching Through Partial Elimination
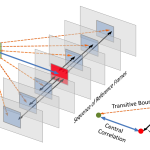
- Exploiting Transitivity of Correlation for Fast Template Matching – Project Page
- VillageFinder: Segmentation of Nucleated Villages in Satellite Imagery

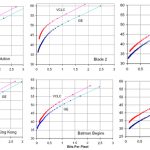
- Video Coding Using Linear Compensation (VCLC) – Project Page
Publications
- Localization Lens for Improving Medical Vision-Language Models
- CATVis: Context-Aware Thought Visualization
- JMP2024 – An exploratory deep learning approach to investigate tuberculosis pathogenesis in nonhuman primate model
- IEEETGRS2024 – Stereollax Net: Stereo Parallax Based Deep Learning Network For Building Height Estimation
- AAAI2023 – Spatio-Temporal driven Attention Graph Neural Network with Block Adjacency matrix (STAG-NN-BA) for Remote Land-use Change Detection
- ICONIP2023 – Stereoential Net: Deep Network for Learning Building Height Using Stereo Imagery
- ICPR2022 – Neural Network Pruning Through Constrained Reinforcement Learning
- ICASSP2022 -Camera Calibration through Camera Projection Loss
- BMVC2021 – Teacher-Class Network: A Neural Network Compression Mechanism
- ICIP2021 – Spatio-Temporal Crop Classification On Volumetric Data
- ICIP2021 – Comprehensive Online Network Pruning via Learnable Scaling Factors
- IEEEJSTAR2020 – Kiln-Net: A gated neural network for detection of brick kilns in South Asia
- IEEE TGRS – A Residual-Dyad Encoder Discriminator Network for Remote Sensing Image Matching
- ICIAP 2019 – Dimensionality Reduction Using Discriminative Autoencoders for Remote Sensing Image Retrieval
- NCA2021 – Statistically Correlated Multi-task Learning for Autonomous Driving
- CVPRW2019 – Tiny-Inception-ResNet-v2: Using Deep Learning for Eliminating Bonded Labors of Brick Kilns in South Asia
- ICASSP 2019 – Using 3D Residual Network For Spatio-Temporal Analysis Of Remote Sensing Data
- ICASSP 2019 – Adaptively Weighted Multi-Task Learning Using Inverse Validation Loss
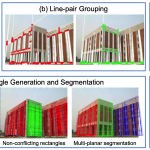
- ICASSP 2019- Point Cloud Segmentation Using Hierarchical Tree for Architectural Models
- PacificGraphics 2017 – Outdoor scene segmentation and reconstruction using LiDAR data
- CGI 2016 – Coarse-to-fine model fitting on point cloud
- Eurographics 2015 – Efficient RANSAC for n-gonal Primitive Fitting
- ECCV 2012 – Shape from Angle Regularity
- ICIP 2012 – Interaction Recognition in Wide Areas Using Audiovisual Sensors
- ToG 2012 – Bilinear Spatiotemporal Basis Models
- TIP 2012 – Correlation Coefficient Based Fast Template Matching Through Partial Elimination
- ICCV 2011 – Multiview Structure from Motion in Trajectory Space
- TPAMI 2011 – Trajectory Space: A Dual Representation for Nonrigid Structure from Motion
- SPM 2011 – Distributed and Decentralized Multi-Camera Tracking: A Survey
- TIP 2010 – Exploiting Transitivity of Correlation for Fast Template Matching
- JBC 2010 – Myosin Motors Drive Long Range Alignment of Actin Filaments
- ICIP 2009 – Early Termination Algorithms for Adaboost Based Detectors
- BMVC 2009 – VillageFinder: Segmentation of Nucleated Villages in Satellite Imagery
- CVPR 2009 – In Defense of Orthonormality Constraints for Nonrigid Structure from Motion
- MTA 2009 – Content and Task-Based View Selection from Multiple Video Streams
- NIPS 2008 – Nonrigid Structure from Motion in Trajectory Space
- ICIP 2008 – Exploiting Local Auto-Correlation Function for Fast Video-to-Reference Image Alignment
- JSTSP 2008 – Target detection and tracking with heterogeneous sensors
- TCSVT 2008 – Efficient Multi-Target Visual Tracking Using Random Finite Sets
- EURASIP 2008 – Detection and Tracking of Humans and Faces
- ACCV 2007 – Exploiting Inter-Frame Correlation for Fast Video to Reference Image Alignment
- ICIP 2007 – Early Termination Algorithms for Correlation Coefficient Based Block Matching
- ICC 2007 – Video Coding with Linear Compensation (VCLC)
Teachings
- CS452 Computer Graphics
- CS436/CS5310 Computer Vision Fundamentals
- CS437/CS5317 Deep Learning
- CS674/EE512 Digital Image Processing






