Eurographics 2015 – Efficient RANSAC for n-gonal Primitive Fitting
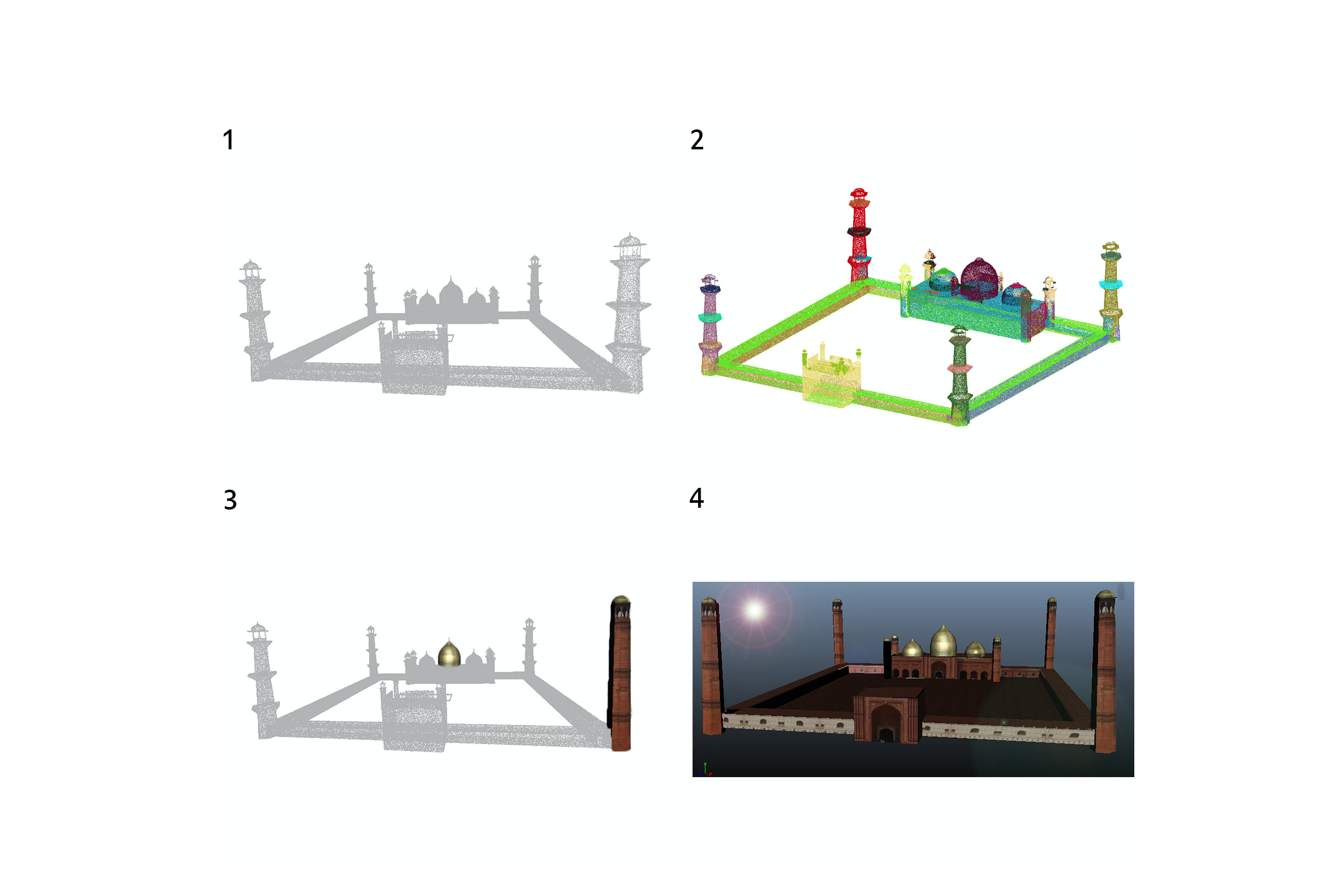
Ahsan Abdullah, Reema Bajwa, Syed Rizwan Gilani, Zuha Agha, Saeed Boor Boor, Murtaza Taj, Sohaib Ahmed Khan The 36th Annual Conference of the European Association for Computer Graphics, 2015 Kongresshaus in Zürich, Switzerland, 4th – 8th May, 2015 Abstract We present a modeling approach to automatically fit 3D primitives to point clouds in order to…