PacificGraphics 2017 – Outdoor scene segmentation and reconstruction using LiDAR data
Omair Hassaan, Abeera Shamail, Zain Butt, Murtaza Taj
The 25th Pacific Conference on Computer Graphics and Applications (Pacific Graphics 2017), Taipei, Taiwan, Oct 16 – 19, 2017
Abstract
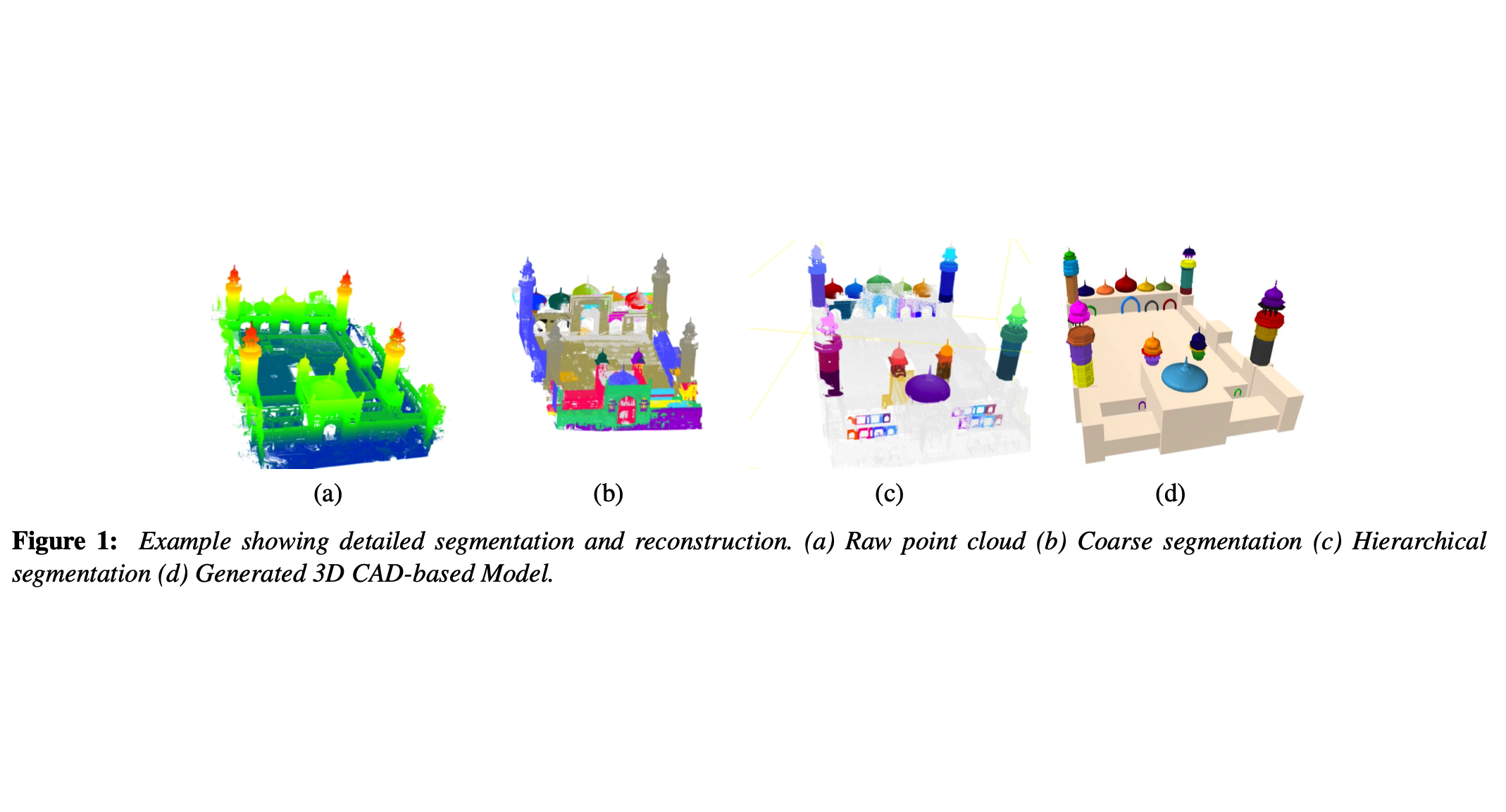
Recent advancements in 3D scanning technologies have paved way for generation of highly accurate 3D scenes in the form of point cloud data. For the segmentation and reconstruction of such scenes, a number of techniques have been introduced in literature. Our approach is a hybrid technique for the segmentation and 3D reconstruction of LiDAR point cloud data, primarily focusing on 3D outdoor scenes. Our model, the hierarchical tree, iteratively divides the point cloud into segments, simultaneously using a novel energy function and a 3D convolutional neural network, HollowNets to classify the segments. We have tested the efficacy of our proposed approach using real data of two sites obtained from Leica Scan Station P20 Terrestrial Laser Scanner and found an accuracy of 95% for domes and minarets.
Resources
![]()
Download PDF
(Distributed here for timely dissemination of scholarly work. Copyright retained by copyright holders. May not be posted without permission from copyright holders.)

Text Reference:
Omair Hassaan, Abeera Shamail, Zain Butt, Murtaza Taj, "Outdoor scene segmentation and reconstruction using LiDAR data", The 25th Pacific Conference on Computer Graphics and Applications (Pacific Graphics 2017), Taipei, Taiwan, Oct 16 - 19, 2017 (poster paper)
Bibtex Reference:
@inproceedings{Coarse2FineCGI2016,
author = "Omair Hassaan and
Abeera Shamail and
Zain Butt and
Murtaza Taj",
title = "Outdoor scene segmentation and reconstruction using LiDAR data",
booktitle = "The 25th Pacific Conference on Computer Graphics and Applications (Pacific Graphics 2017)",
month = "Oct ",
year = "2017",
}